Maniwav
简介 :
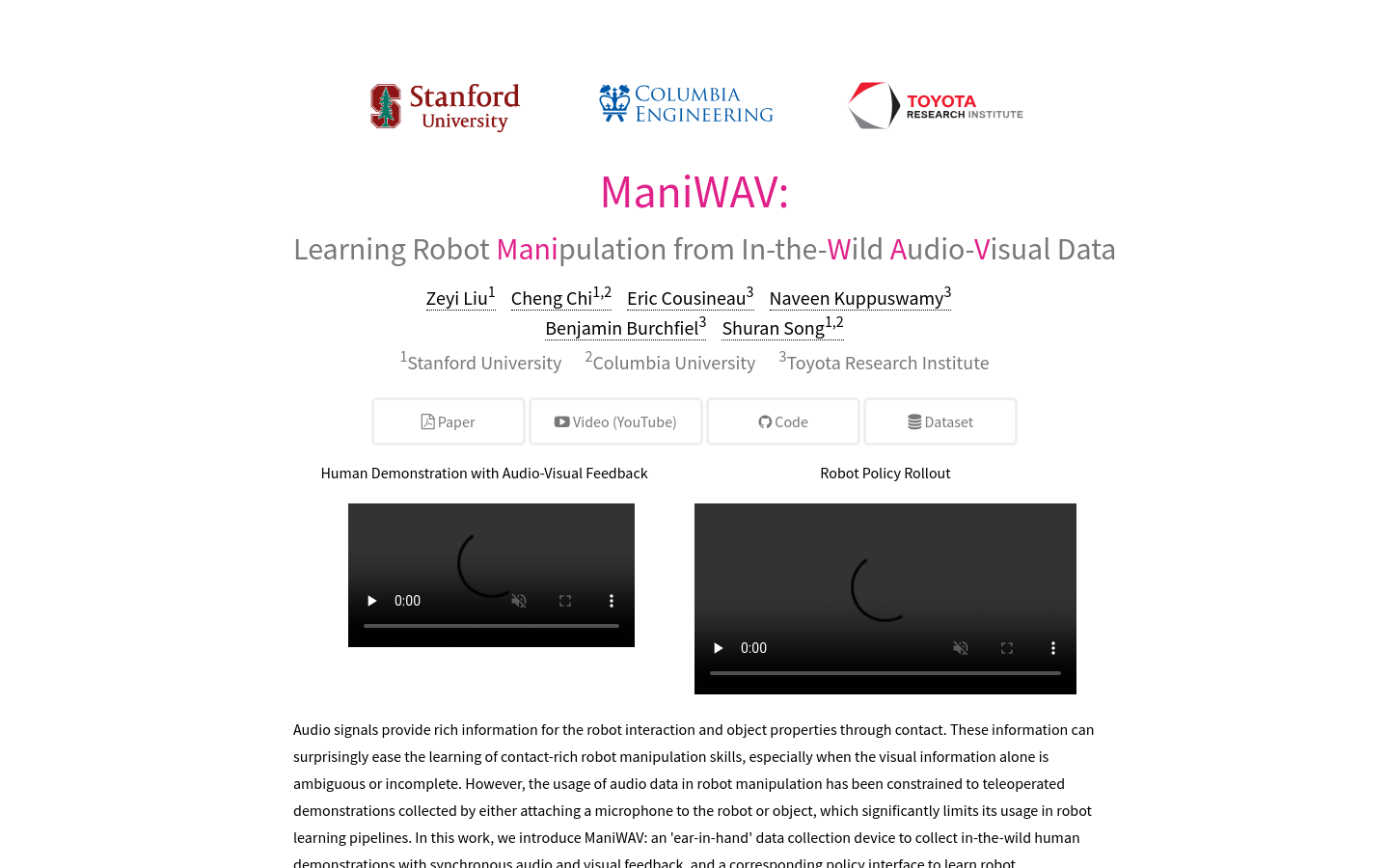
ManiWAV是一个研究项目,旨在通过野外的音频和视觉数据学习机器人操控技能。它通过收集人类演示的同步音频和视觉反馈,并通过相应的策略接口直接从演示中学习机器人操控策略。该模型展示了通过四个接触丰富的操控任务来证明其系统的能力,这些任务需要机器人被动地感知接触事件和模式,或主动地感知物体表面的材料和状态。此外,该系统还能够通过学习多样化的野外人类演示来泛化到未见过的野外环境中。
需求人群 :
ManiWAV的目标受众主要是机器人学和人工智能领域的研究者和开发者。他们可以利用ManiWAV来提高机器人在复杂环境中的操控技能,尤其是在视觉信息不明确或不完整的情况下,通过音频信息增强机器人的感知能力。
使用场景
使用ManiWAV系统擦拭白板上的图形
利用ManiWAV翻转平底锅中的百吉饼
使用ManiWAV将骰子从一个杯子倒入另一个杯子
使用ManiWAV用Velcro胶带固定电线
产品特色
通过音频信号提供丰富的交互和物体属性信息
使用'ear-in-hand'数据收集设备同步收集音频和视觉反馈
直接从人类演示中学习机器人操控策略
在四个接触丰富的操控任务中展示系统能力
通过多样化的野外人类演示学习,实现对未见过环境的泛化
使用教程
1. 安装并设置ManiWAV数据收集设备,确保音频和视觉反馈同步
%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%230080ff;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st0'%20d='M16.2,11.1c.4.5.4,1.2,0,1.8l-4.7,7.1h-3.8l5.3-8L7.6,4h3.8l4.7,7.1Z'/%3e%3c/svg%3e)
2. 收集人类演示数据,包括接触事件和物体表面材料的音频信号
3. 使用收集的数据训练机器人操控策略
4. 在不同的野外环境中测试和验证策略的有效性
5. 根据测试结果调整策略,以提高机器人的泛化能力
6. 将训练好的策略应用于实际的机器人操控任务


精选AI产品推荐

Universal Manipulation Interface
通用操作接口(UMI)是一个数据收集和策略学习框架,允许直接将现场人类演示中的技能转移到可部署的机器人策略。UMI采用手持夹具与仔细的界面设计相结合,实现便携、低成本和信息丰富的数据收集,用于挑战性的双手和动态操作演示。为促进可部署的策略学习,UMI结合了精心设计的策略界面,具有推理时延迟匹配和相对轨迹动作表示。从而产生的学习策略与硬件无关,并且可以在多个机器人平台上部署。配备这些功能,UMI框架解锁了新的机器人操作功能,仅通过为每个任务更改训练数据,允许泛化的动态、双手、精确和长时间的行为,从而实现零次调整。我们通过全面的真实环境实验演示了UMI的通用性和有效性,其中仅通过使用各种人类演示进行训练的UMI策略,在面对新环境和对象时实现了零次调整的泛化。
AI机器人机器人
111.0K
Cyberdemo
CyberDemo是一个旨在通过模拟人类演示来增强现实世界中灵巧操作的项目。它可能涉及到机器人技术、机器学习和模拟环境的结合,以提高机器人在复杂环境中的操作能力。
AI机器人机器学习
69.8K
%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23061b40;%20}%20.st1%20{%20fill:%20%23306af1;%20}%20.st2%20{%20fill:%20%235ce5cf;%20}%20%3c/style%3e%3c/defs%3e%3cg%3e%3cpath%20class='st0'%20d='M55,10.5h9v3h-9v9h12V7.5h-12v3ZM64,19.5h-6v-3h6v3Z'/%3e%3cpolygon%20class='st0'%20points='69%2016.5%2078%2016.5%2078%2019.5%2069%2019.5%2069%2022.5%2081%2022.5%2081%2013.5%2072%2013.5%2072%2010.5%2081%2010.5%2081%207.5%2069%207.5%2069%2016.5'/%3e%3cpolygon%20class='st0'%20points='95%2010.5%2095%207.5%2083%207.5%2083%2022.5%2095%2022.5%2095%2019.5%2086%2019.5%2086%2016.5%2095%2016.5%2095%2013.5%2086%2013.5%2086%2010.5%2095%2010.5'/%3e%3cpath%20class='st0'%20d='M40,1.5v21h11.6l1.4-1.4v-7.6h0c0,0-1.4-1.5-1.4-1.5l1.4-1.4V2.9l-1.4-1.4h-11.6ZM50,19.5h-7v-6h7v6ZM50,10.5h-7v-6h7v6Z'/%3e%3c/g%3e%3cpath%20class='st1'%20d='M23.1,24L14.7,4.8l-4.9,11.2h3.8l-1.8,4H3.3L12.1,0H2C.9,0,0,.9,0,2v20c0,1.1.9,2,2,2h21.1Z'/%3e%3cpath%20class='st2'%20d='M34,0h-16.8l10.6,24h6.2c1.1,0,2-.9,2-2V2C36,.9,35.1,0,34,0ZM32.5,20h-4V4h4v16Z'/%3e%3c/svg%3e)
智启未来,您的人工智能解决方案智库
简体中文