
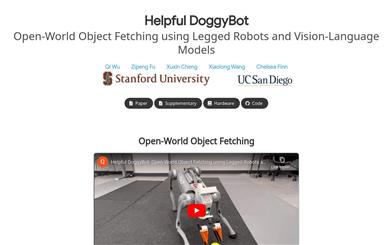
Helpful DoggyBot
简介 :
Helpful DoggyBot是一个四足机器人室内移动操作系统,它通过前端夹持装置进行物体操作,使用在模拟环境中训练的低级控制器实现敏捷技能,如攀爬和全身倾斜。此外,它还结合了预训练的视觉-语言模型(VLMs)进行语义理解和命令生成。该系统在没有实际数据收集或训练的情况下,能在未见过的环境中零样本泛化完成任务,如按照用户的指令在攀爬过后的床边取回随机放置的玩具,成功率达到60%。
需求人群 :
Helpful DoggyBot适合于科研人员、机器人爱好者和自动化领域的专业人士。它为研究和开发四足机器人提供了一个平台,可以用于探索机器人在家庭、救援和其他需要复杂交互的环境中的应用。
使用场景
在家庭环境中按照用户的指令取回玩具
在救援场景中攀爬障碍物并执行搜索任务
在自动化仓库中进行货物搬运
产品特色
前端夹持装置用于物体操作
低级控制器在模拟环境中训练,实现攀爬和全身倾斜等敏捷技能
使用预训练的视觉-语言模型(VLMs)进行语义理解和命令生成
无需实际数据收集或训练即可在新环境中零样本泛化完成任务
能够理解用户的指令并执行相应的操作
在室内环境中具有较高的可达性和通过性
支持与人类互动,执行室内技能任务
使用教程
1. 安装并配置所需的硬件和软件环境
%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%230080ff;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st0'%20d='M16.2,11.1c.4.5.4,1.2,0,1.8l-4.7,7.1h-3.8l5.3-8L7.6,4h3.8l4.7,7.1Z'/%3e%3c/svg%3e)
2. 下载并安装Helpful DoggyBot的代码
3. 根据文档设置机器人的低级控制器
4. 配置视觉-语言模型以理解特定命令
5. 在模拟环境中进行初步测试,确保机器人能够执行基本操作
6. 在实际环境中部署机器人并进行任务测试
7. 根据测试结果调整机器人的参数和操作逻辑
8. 持续监控机器人的性能并进行必要的维护

精选AI产品推荐
Openui
构建UI组件通常是一项乏味的工作。OpenUI旨在使这一过程变得有趣、快捷和灵活。这也是我们在W&B用于测试和原型化下一代工具的工具,用于在LLM的基础上构建强大的应用程序。您可以使用想象力描述UI,然后实时查看渲染效果。您可以要求进行更改,并将HTML转换为React、Svelte、Web组件等。就像是V0的开源和不太精致的版本。
AI开发助手可视化
793.8K
Opendevin
OpenDevin是一个开源项目,目标是复制、增强和创新Devin——一个能够执行复杂工程任务并与用户在软件开发项目上积极协作的自主AI软件工程师。该项目通过开源社区的力量,探索和扩展Devin的能力,识别其优势和改进空间,以指导开源代码模型的进展。
AI开发助手AI算力平台
622.1K
%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23061b40;%20}%20.st1%20{%20fill:%20%23306af1;%20}%20.st2%20{%20fill:%20%235ce5cf;%20}%20%3c/style%3e%3c/defs%3e%3cg%3e%3cpath%20class='st0'%20d='M55,10.5h9v3h-9v9h12V7.5h-12v3ZM64,19.5h-6v-3h6v3Z'/%3e%3cpolygon%20class='st0'%20points='69%2016.5%2078%2016.5%2078%2019.5%2069%2019.5%2069%2022.5%2081%2022.5%2081%2013.5%2072%2013.5%2072%2010.5%2081%2010.5%2081%207.5%2069%207.5%2069%2016.5'/%3e%3cpolygon%20class='st0'%20points='95%2010.5%2095%207.5%2083%207.5%2083%2022.5%2095%2022.5%2095%2019.5%2086%2019.5%2086%2016.5%2095%2016.5%2095%2013.5%2086%2013.5%2086%2010.5%2095%2010.5'/%3e%3cpath%20class='st0'%20d='M40,1.5v21h11.6l1.4-1.4v-7.6h0c0,0-1.4-1.5-1.4-1.5l1.4-1.4V2.9l-1.4-1.4h-11.6ZM50,19.5h-7v-6h7v6ZM50,10.5h-7v-6h7v6Z'/%3e%3c/g%3e%3cpath%20class='st1'%20d='M23.1,24L14.7,4.8l-4.9,11.2h3.8l-1.8,4H3.3L12.1,0H2C.9,0,0,.9,0,2v20c0,1.1.9,2,2,2h21.1Z'/%3e%3cpath%20class='st2'%20d='M34,0h-16.8l10.6,24h6.2c1.1,0,2-.9,2-2V2C36,.9,35.1,0,34,0ZM32.5,20h-4V4h4v16Z'/%3e%3c/svg%3e)
智启未来,您的人工智能解决方案智库
简体中文