Rekep
简介 :
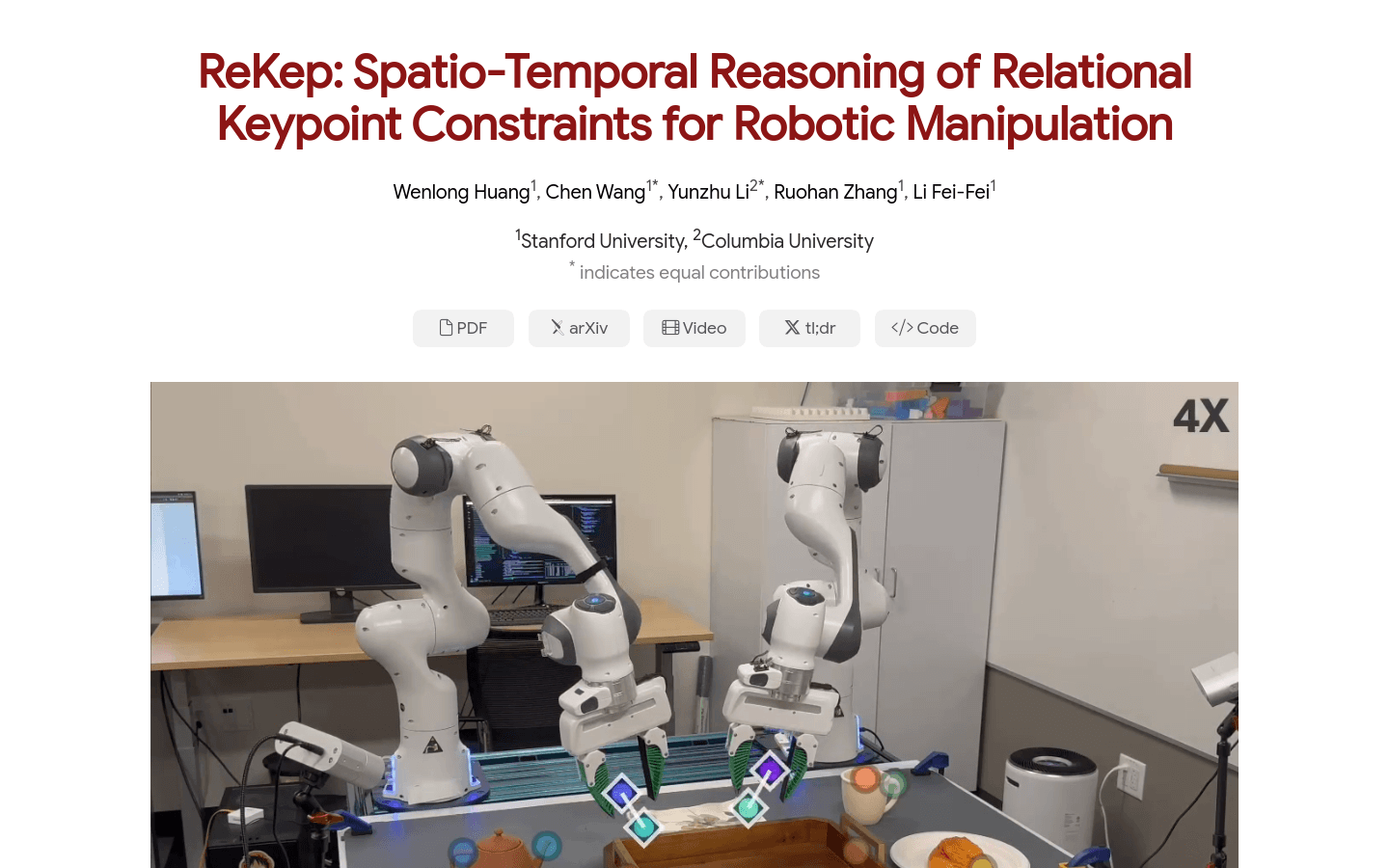
ReKep是一个用于机器人操控的时空关系关键点约束推理系统,它通过将机器人操控任务表示为关联机器人和环境的约束来编码期望的机器人行为。ReKep利用大型视觉模型和视觉-语言模型,无需特定任务训练或环境模型,即可生成基于关键点的约束,这些约束可以被优化以实现多阶段、野外、双手和反应性行为。ReKep的主要优点包括其通用性、无需手动标记以及能够被现成求解器实时优化以产生机器人动作。
需求人群 :
ReKep的目标受众是机器人学、自动化和人工智能领域的研究人员和工程师。它适合那些需要开发能够理解和执行复杂操控任务的机器人系统的专业人士。
使用场景
在多阶段任务中,ReKep能够优化机器人的动作以折叠不同类型的衣物。
在野外环境中,ReKep使机器人能够适应环境变化,如在操作过程中物体位置的随机变化。
ReKep支持双手操控任务,例如同时操作两个机械臂进行复杂的组装任务。
产品特色
使用RGB-D观察和自由形式语言指令生成关键点候选
通过DINOv2和GPT-4o生成ReKep约束作为Python程序
采用层次优化过程解决机器人动作
实时闭环重规划,包括阶段内和阶段间的重规划
支持双手操控任务
在野外环境中进行操控任务
能够为同一任务生成不同的策略
使用教程
1. 准备RGB-D观察和自由形式语言指令。
%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%230080ff;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st0'%20d='M16.2,11.1c.4.5.4,1.2,0,1.8l-4.7,7.1h-3.8l5.3-8L7.6,4h3.8l4.7,7.1Z'/%3e%3c/svg%3e)
2. 使用DINOv2识别场景中的关键点。
3. 将关键点和指令输入GPT-4o生成ReKep约束。
4. 利用层次优化过程求解机器人动作。
5. 进行实时闭环重规划以适应环境变化。
6. 执行机器人动作序列以完成任务。
7. 根据需要调整和优化ReKep约束。

精选AI产品推荐
Openui
构建UI组件通常是一项乏味的工作。OpenUI旨在使这一过程变得有趣、快捷和灵活。这也是我们在W&B用于测试和原型化下一代工具的工具,用于在LLM的基础上构建强大的应用程序。您可以使用想象力描述UI,然后实时查看渲染效果。您可以要求进行更改,并将HTML转换为React、Svelte、Web组件等。就像是V0的开源和不太精致的版本。
AI开发助手可视化
793.8K
Opendevin
OpenDevin是一个开源项目,目标是复制、增强和创新Devin——一个能够执行复杂工程任务并与用户在软件开发项目上积极协作的自主AI软件工程师。该项目通过开源社区的力量,探索和扩展Devin的能力,识别其优势和改进空间,以指导开源代码模型的进展。
AI开发助手AI算力平台
622.1K
%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23061b40;%20}%20.st1%20{%20fill:%20%23306af1;%20}%20.st2%20{%20fill:%20%235ce5cf;%20}%20%3c/style%3e%3c/defs%3e%3cg%3e%3cpath%20class='st0'%20d='M55,10.5h9v3h-9v9h12V7.5h-12v3ZM64,19.5h-6v-3h6v3Z'/%3e%3cpolygon%20class='st0'%20points='69%2016.5%2078%2016.5%2078%2019.5%2069%2019.5%2069%2022.5%2081%2022.5%2081%2013.5%2072%2013.5%2072%2010.5%2081%2010.5%2081%207.5%2069%207.5%2069%2016.5'/%3e%3cpolygon%20class='st0'%20points='95%2010.5%2095%207.5%2083%207.5%2083%2022.5%2095%2022.5%2095%2019.5%2086%2019.5%2086%2016.5%2095%2016.5%2095%2013.5%2086%2013.5%2086%2010.5%2095%2010.5'/%3e%3cpath%20class='st0'%20d='M40,1.5v21h11.6l1.4-1.4v-7.6h0c0,0-1.4-1.5-1.4-1.5l1.4-1.4V2.9l-1.4-1.4h-11.6ZM50,19.5h-7v-6h7v6ZM50,10.5h-7v-6h7v6Z'/%3e%3c/g%3e%3cpath%20class='st1'%20d='M23.1,24L14.7,4.8l-4.9,11.2h3.8l-1.8,4H3.3L12.1,0H2C.9,0,0,.9,0,2v20c0,1.1.9,2,2,2h21.1Z'/%3e%3cpath%20class='st2'%20d='M34,0h-16.8l10.6,24h6.2c1.1,0,2-.9,2-2V2C36,.9,35.1,0,34,0ZM32.5,20h-4V4h4v16Z'/%3e%3c/svg%3e)
智启未来,您的人工智能解决方案智库
简体中文